
Vielleicht ist das dem ein oder anderen schon passiert, man ist abgestürzt, läuft zu seinem Kopter und hat dabei noch den Transmitter um den Hals hängen. Wenn man sich dann nach unten beugt, bleibt man hängen und flippt einen der Switches, mit Pech sogar den arm Switch. Zum Glück ist mit der Taranis fast alles möglich, deshalb seht ihr hier, wie man einen sicheren ARM Switch erstellt. Ziel ist es den normalen arm Switch zu betätigen und dann noch einen zweiten Switch eine bestimmte Zeit halten zu müssen.
Als erstes müssen wir einige Logical Switches erstellen, diesen Menüpunkt findet ihr unter dem jeweiligen Model, für das ihr den Safe Switch erstellen wollt. Außerdem wird mit dieser Anleitung auch die tickende Zeitbombe verhindert, wenn ihr den arm Switch betätigt habt, während das Throttle nicht ganz unten war und ihr dann das Throttle nach unten bewegt, der Kopter sofort armt.
 Wie auf dem Bild zu sehen, brauchen wir insgesamt 4 „Logical Switches“.
Wie auf dem Bild zu sehen, brauchen wir insgesamt 4 „Logical Switches“.
Auf L1 legen wir uns einen „Edge Switch“
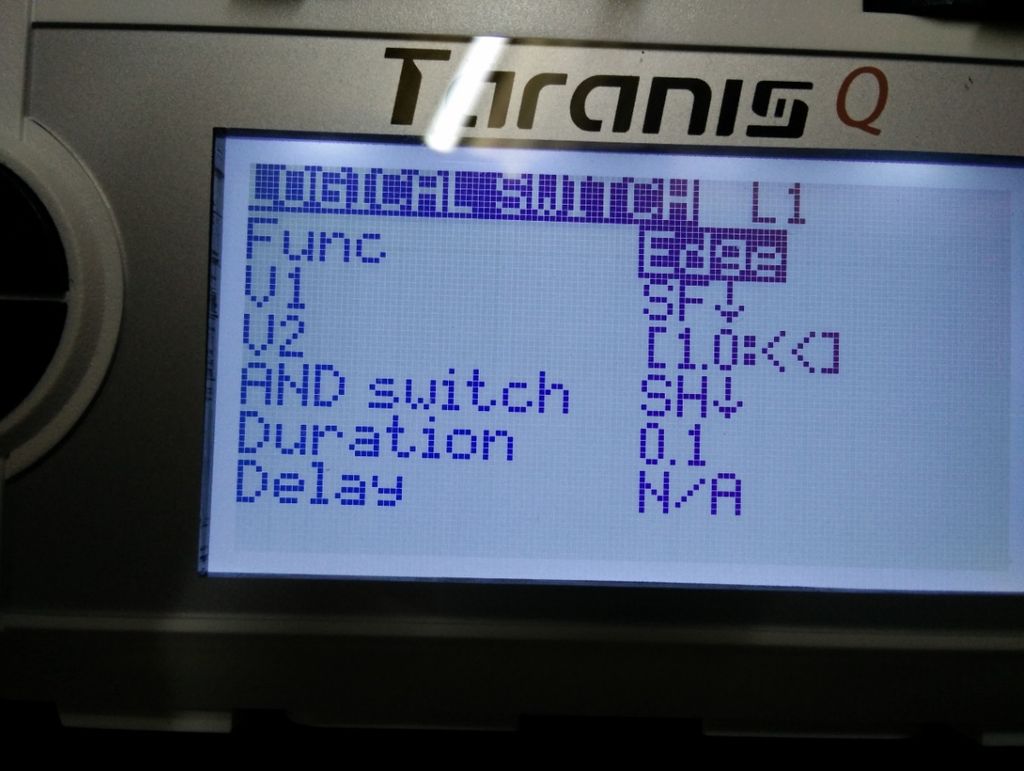 V1 ist dabei der „Hauptswitch“. Deshalb nimmt man dafür am besten den Switch, den man davor auch zum Armen genutzt hat. Unter V2 können wir uns die Zeit aussuchen, die die beiden Switches mindestens zusammen aktiviert sein müssen, ich habe eine Sekunde gewählt. Das << Symbol gibt an, dass der Switch mehr als die eingestellte Zeit gehalten werden muss.
V1 ist dabei der „Hauptswitch“. Deshalb nimmt man dafür am besten den Switch, den man davor auch zum Armen genutzt hat. Unter V2 können wir uns die Zeit aussuchen, die die beiden Switches mindestens zusammen aktiviert sein müssen, ich habe eine Sekunde gewählt. Das << Symbol gibt an, dass der Switch mehr als die eingestellte Zeit gehalten werden muss.
„AND Switch“ ist der Switch, den man dann zusätzlich eine Sekunde halten muss. Besonders eignet sich hierfür der Momentaryswitch, der nach dem loslassen sofort wieder in seine ursprüngliche Position zurückspringt. Die Duration ist für unseren Zweck belanglos.
Als nächstes stellen wir sicher, dass wir nicht Armen können, wenn das Throttle nicht auf seiner niedrigsten Position ist.
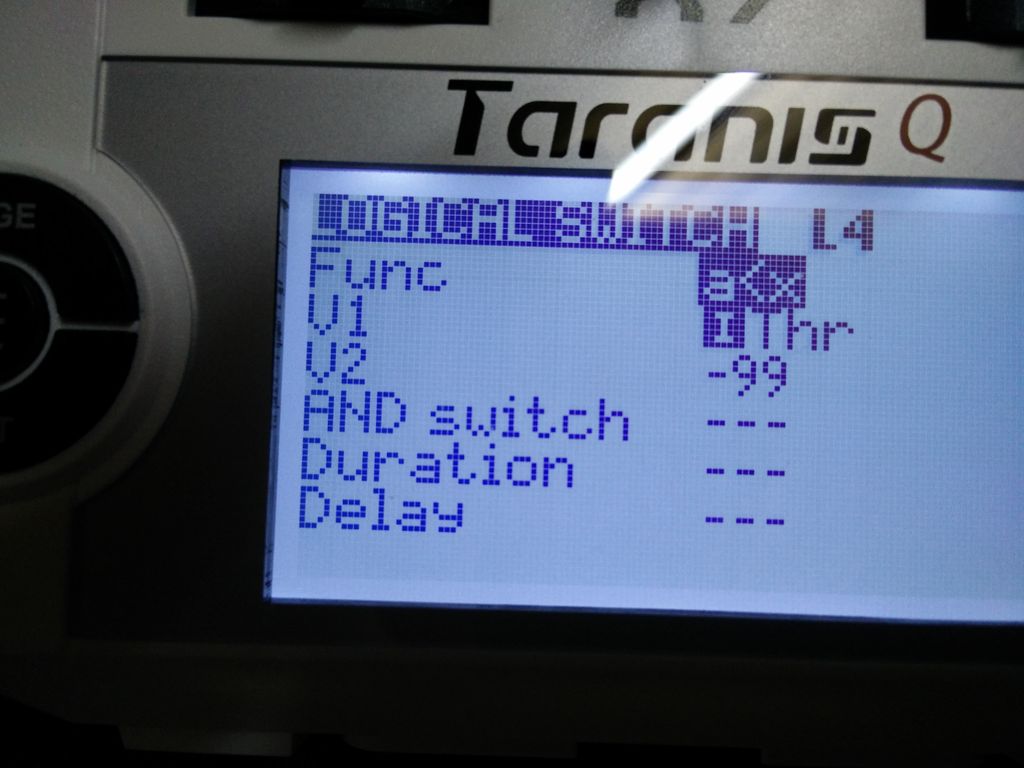 Die Bedingung, dass L4 aktiviert wird, ist a<x, wobei a das Throttle und x V2 ist. Da wir wollen, dass das Throttle auf seiner niedrigsten Position, also -100 ist, wird V2 auf -99 eingestellt.
Die Bedingung, dass L4 aktiviert wird, ist a<x, wobei a das Throttle und x V2 ist. Da wir wollen, dass das Throttle auf seiner niedrigsten Position, also -100 ist, wird V2 auf -99 eingestellt.
Wenn das geschafft ist, kommen wir zu unserm vorletzten Switch, der sogenannte AND Switch. Dieser aktiviert sich, wenn, wie der Name schon sagt, Bedingung 1 UND Bedingung 2 erfüllt sind.
 Wir wollen, dass L3 aktiviert wird, wenn wir L1, also unseren neuen Armswitch, aktivieren und das Throttle auf -100 steht (unser L4). Deshalb wählen wir als V1 L1 und als AND Switch L4.
Wir wollen, dass L3 aktiviert wird, wenn wir L1, also unseren neuen Armswitch, aktivieren und das Throttle auf -100 steht (unser L4). Deshalb wählen wir als V1 L1 und als AND Switch L4.
Jetzt ist der letzte Switch an der Reihe: ein „Sticky switch“. Dieser bleibt aktiviert, bis wir ihn deaktivieren.
 Wenn die Bedingung V1 eintritt, wird der Switch aktiviert. Als V1 nehmen wir L3, da L3 aktiviert wird, wenn wir 1. unsere arm Switches aktivieren und 2. das Throttle auf seiner niedrigsten Position ist.
Wenn die Bedingung V1 eintritt, wird der Switch aktiviert. Als V1 nehmen wir L3, da L3 aktiviert wird, wenn wir 1. unsere arm Switches aktivieren und 2. das Throttle auf seiner niedrigsten Position ist.
V2 ist die Bedingung, die den „Sticky Switch“ deaktiviert. Hierfür wählen wir die ursprüngliche Position unseres Hauptarm Switches. Das Armen ist jetzt nicht mehr mit nur einem Handgriff möglich. Das Disarmen allerdings immer noch wie gewohnt.
Mit den Logical Switches sind wir jetzt fertig. Nun müssen wir das Ganze nur noch im Mixer einstellen.
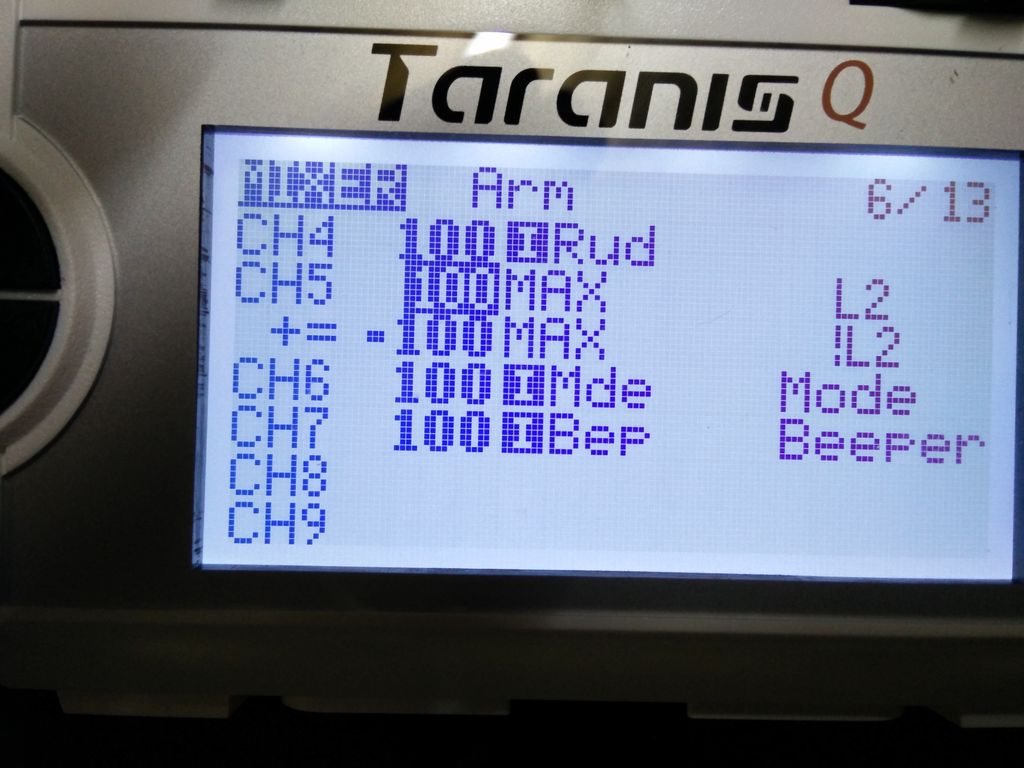 Hierzu stellen wir, je nachdem, auf welchem Channel der arm Switch liegt bei mir Channel 5 als Switch L2 ein – auf dem Bild nicht zu sehen, einfach weiter runter scrollen. „Source“ wird auf MAX und „Weight“ auf 100 gesetzt.
Hierzu stellen wir, je nachdem, auf welchem Channel der arm Switch liegt bei mir Channel 5 als Switch L2 ein – auf dem Bild nicht zu sehen, einfach weiter runter scrollen. „Source“ wird auf MAX und „Weight“ auf 100 gesetzt.
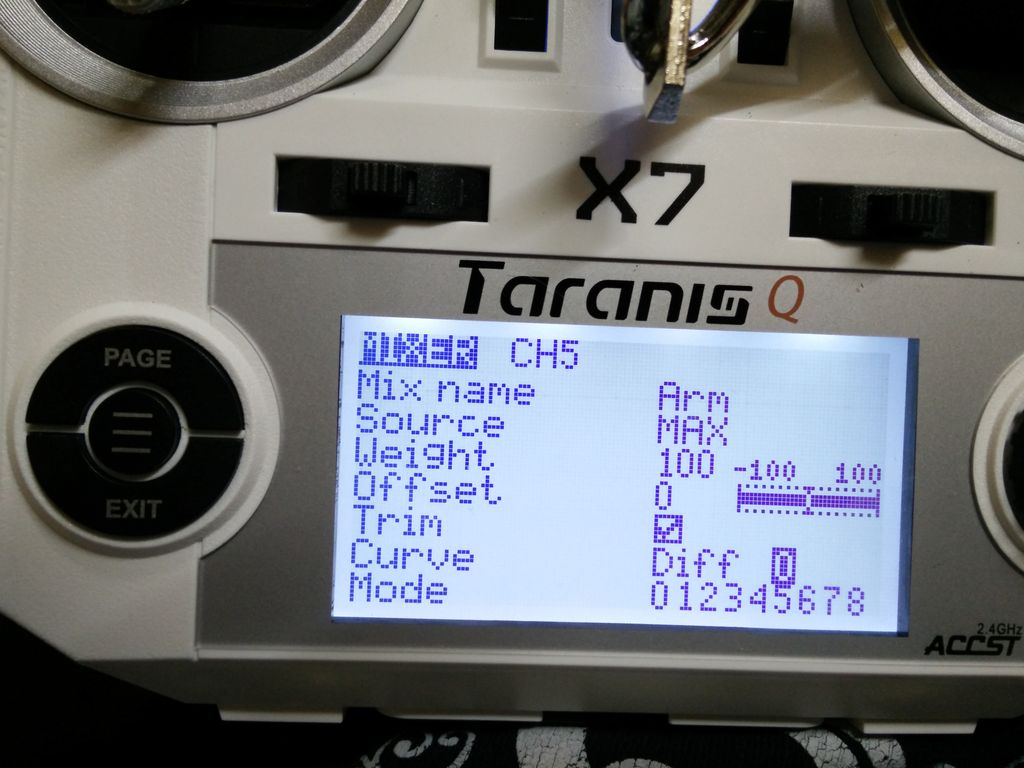 Danach müsst ihr lange auf CH5 drücken und „Insert After“ auswählen. Hier öffnet sich nochmal ein Fenster, das so aussieht wie auf dem Bild. Dort stellt ihr „Source“ auch auf MAX, „Weight“ aber auf -100 und „Switch“ auf !L2 (sprich „not L2“ -> immer wenn L2 nicht „true“ ist, also nicht aktiviert, ist der Kopter disarmed).
Danach müsst ihr lange auf CH5 drücken und „Insert After“ auswählen. Hier öffnet sich nochmal ein Fenster, das so aussieht wie auf dem Bild. Dort stellt ihr „Source“ auch auf MAX, „Weight“ aber auf -100 und „Switch“ auf !L2 (sprich „not L2“ -> immer wenn L2 nicht „true“ ist, also nicht aktiviert, ist der Kopter disarmed).
Das wars. Nun müsst ihr nur noch den Kopter an den PC anschließen und unter Modes die Bereiche zum Armen neu einstellen.
Auf jeden Fall am PC OHNE PROPELLER ausprobieren ob alles noch so funktioniert, wie es soll, damit, falls ihr einen Fehler gemacht habt, nichts schiefgeht. Nicht ist schlimmer als Armen, aber dann nicht mehr Disarmen zu können, weil man den falschen Switch eingestellt hat.