Diverse FrSky Empfänger wie z.B. der belieblte R-XSR übermitteln an den Sender einen RSSI Wert. RSSI steht für Received Signal Strength Indicator und bedeutet kurz gesagt Signalstärke. Also wie gut die Verbindung zwischen Sender und Empfänger ist.
An Sender kann man sich diesen Wert anzeigen, ansagen oder auch Regeln für Aktionen definieren. So kann man als Beispiel bei Unterschreiten eines Schwellwertes erreichen, dass die FrSky Taranis X9D+ kurz vibriert. Der Pilot kann dan reaieren und den Kopter wieder näher an sich heranholen. Eines von von vielen denkbaren Szenarien.
Über Betaflight kann man sich seine OSD Anzeige nach belieben einstellen. Verwendet man das RSSI Objekt, bekommt man zunächst nur den Wert 0 ausgegeben.
Den RSSI Wert kann man über verschiedene Wege vom Empfänger abgreifen. Sofern der Empfänger über ein Signalausgang verfügt, kann man ein Kabel an einen entsprechenden Port des Flightcontrollers löten. Wenn der Empfänger das RSSI Telemetrie-Signal an den Sender zurücksendet, besteht die Möglichkeit den RSSI Wert als Input am Sender zu verwenden und dieses über einen Mischer wieder an den Empfänger auf beliebigen Kanal zu senden. Diesen Kanal stellt man in Betaflight dann als RSSI Kanal ein und schon wird der RSSI-Wert im OSD ausgegeben.
In diesem Tipps und Tricks Beitrag zeigen wir euch, wie man via OpenTX und Betaflight einen RSSI Wert im OSD anzeigen lassen kann. Als Hardware wird eine FrSky Taranis X9D+* Sendeanlage und ein FrSky R-XSR* Empfänger eingesetzt. OpenTX liegt in Version 2.1.9 und Betaflight in Version 3.5.0 vor.
FrSky Taranis X9D+ RSSI Input und Mischer einstellen
Zunächst ist sicherzustellen, dass im Sender ein RSSI Telemetrie Signal vom Empfänger zurückgegeben wird. Überprüfen kann man dies wenn Sendeanlage und Kopter eingeschaltet und verbunden sind. In den Modell-Einstellungen der Taranis wechselt man dazu auf die Seite TELEMETRIE.
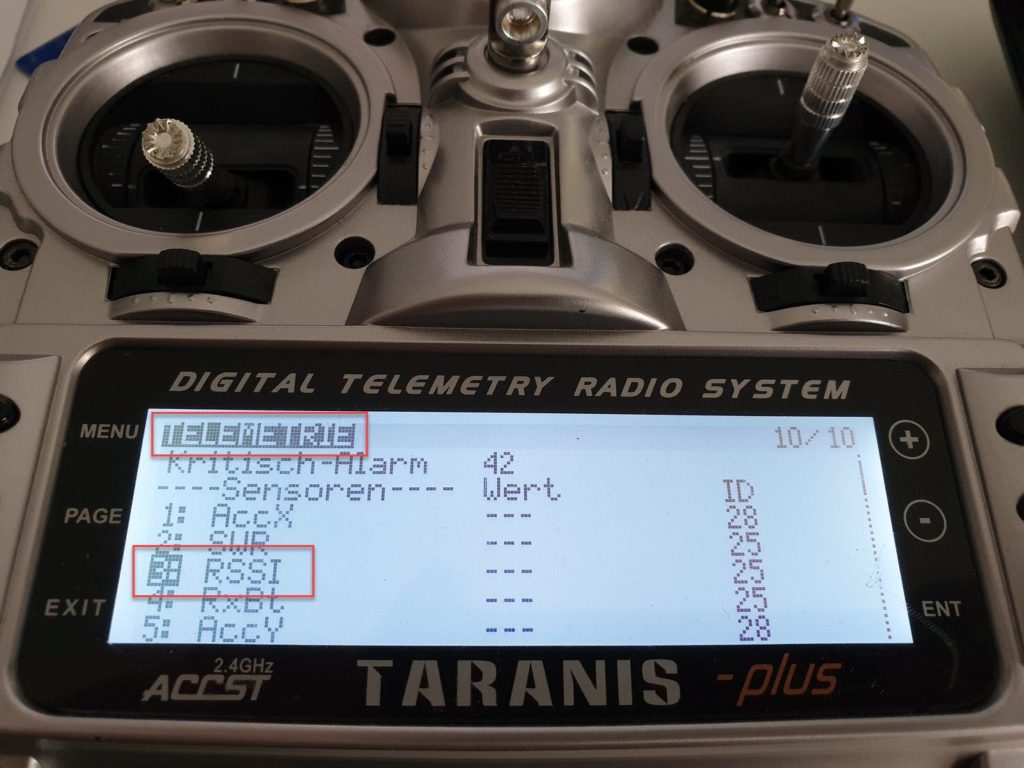
Sollte kein RSSI Sensor angezeigt werden. Kann man hier im Menü auch den Suchlauf starten. Spätestens dann sollte er da sein. Vorausgesetzt, der Empfänger unterstützt Telemetrie.
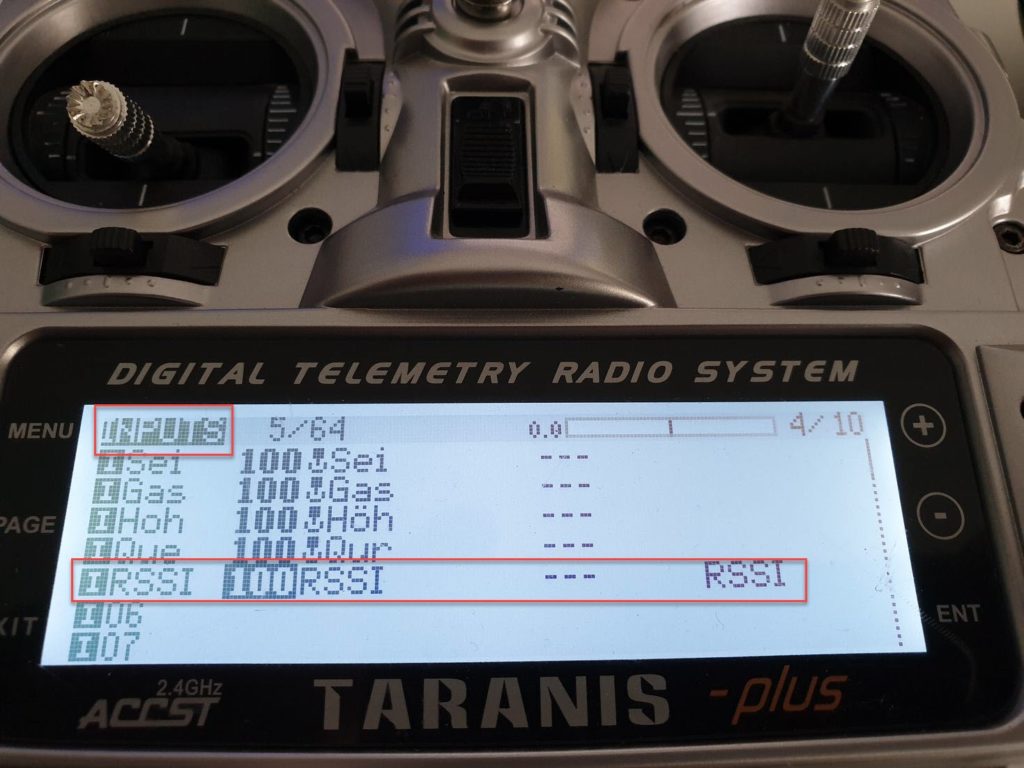
Wenn der RSSI Sensor vorhanden ist, gilt es nun ein INPUT dafür anzulegen. Im Modell wechselt man dazu auf die Seite INPUTS. Im Beispiel habe Input 5 dafür ausgewählt. Es kann jeder beliebige Input dafür verwendet werden.
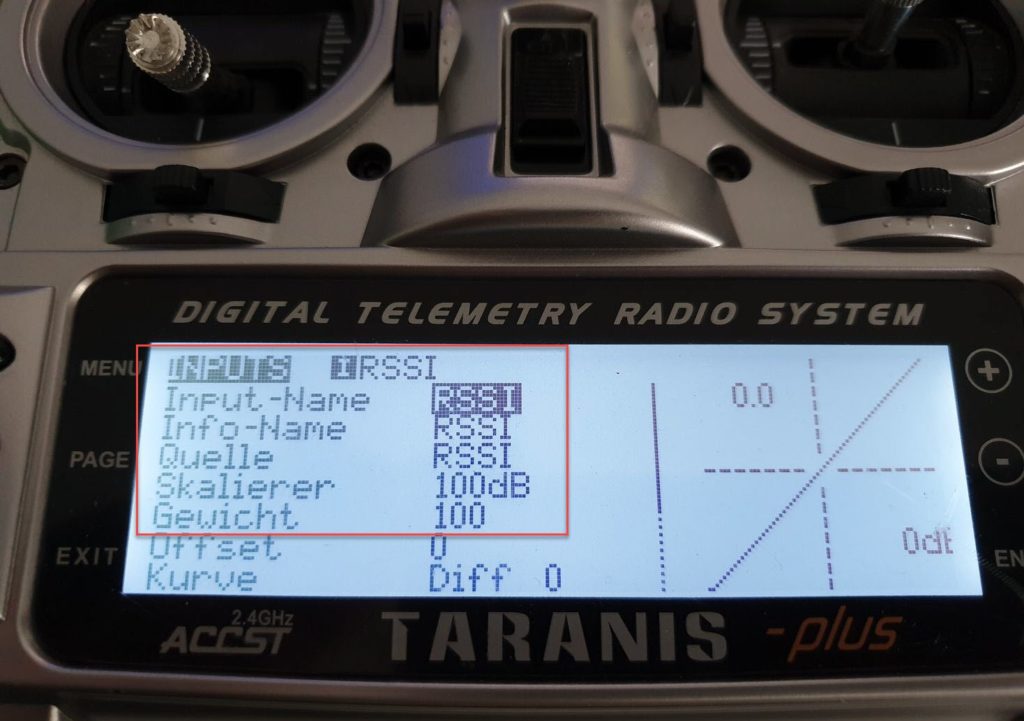
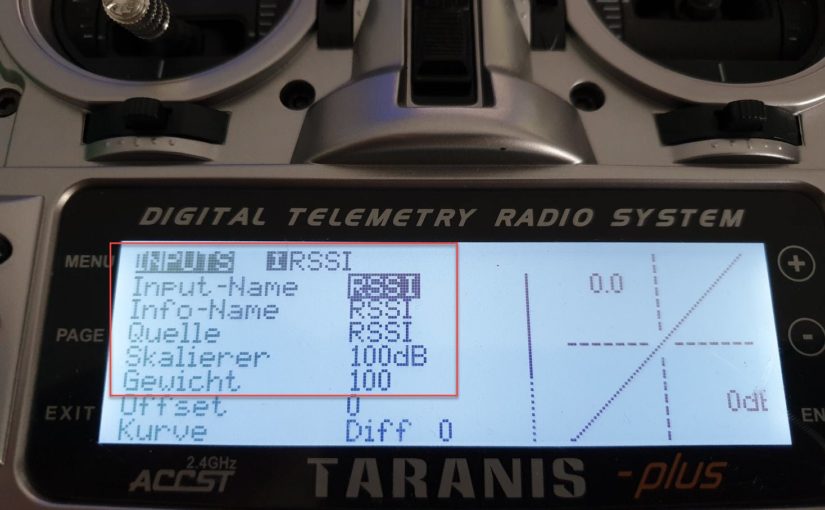
Einstellungen wie folgt:
Input-Name: RSSI
Info-Name: RSSI
Quelle: Hier wählt man den Sensor RSSI aus.
Skalierer: steht in der Regel auf 100db
Gewicht: hier ist 100 einzustellen
Als letzter Schritt ist nun noch ein Mischer einzustellen. Dazu im Modell auf die Seite MISCHER wechseln. Im Beispiel verwende ich hier den Kanal 12 (CH12). Es kann jeder beliebige Kanal verwendet werden. Wichtig ist nur, dass dieser auch zum Empfänger übertragen wird.
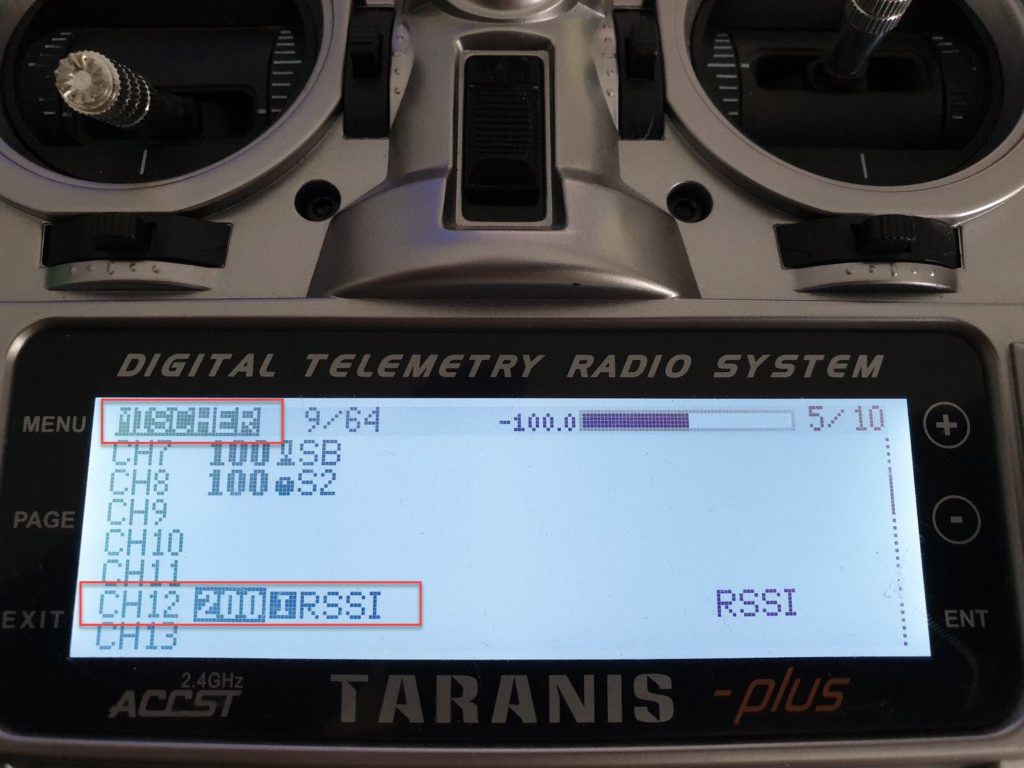
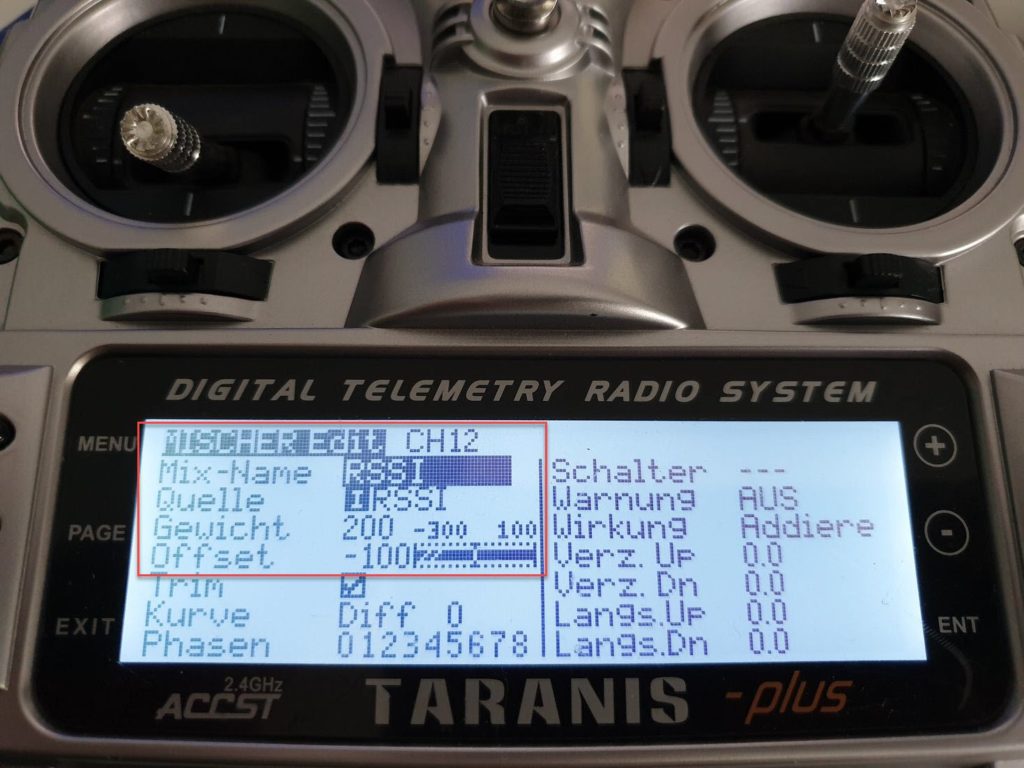
Einstellungen wie folgt:
Mix-Name: RSSI
Quelle: Input RSSI (zuvor angelegt)
Gewicht: ist auf 200 einzustellen
Offset: ist auf -100 einzustellen
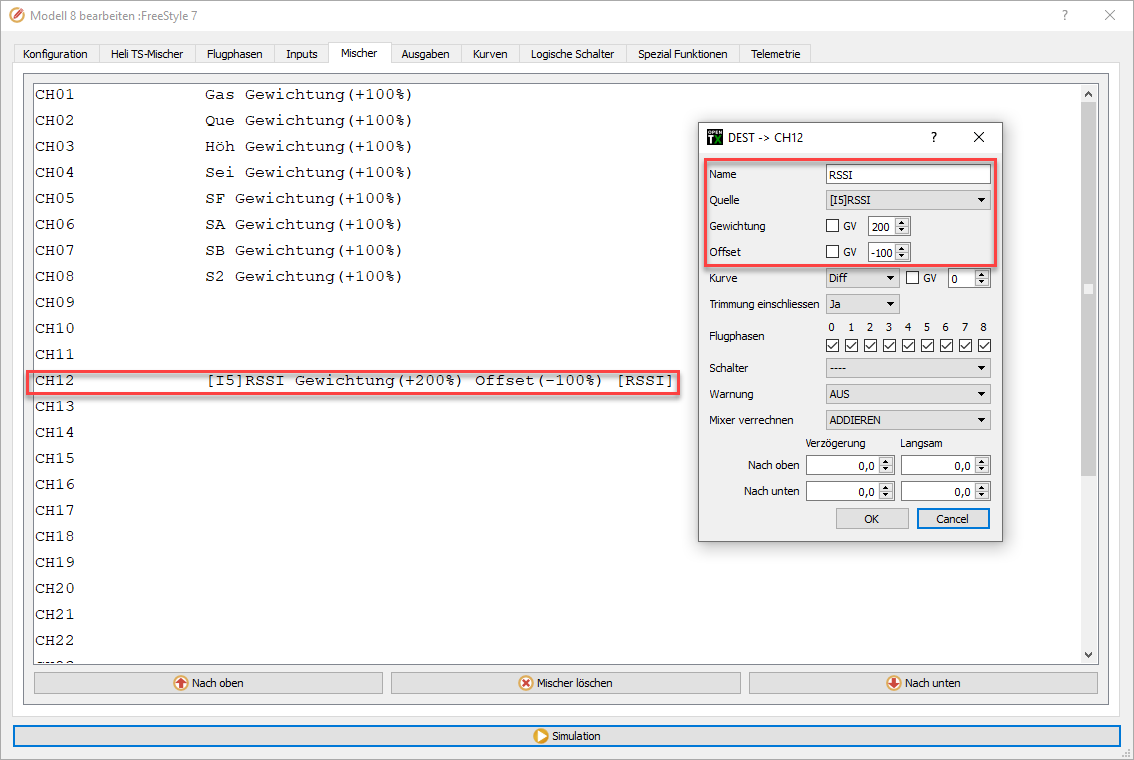
Das waren nun alle Einstellungen welche in der Taranis vorzunehmen sind. Wer die Einstellungen für das Modell lieber am PC vornehmen möchte, kann die auch über die Modell-Konfiguration mittels Companion OpenTX Software machen. Hier ein Beispiel dafür:

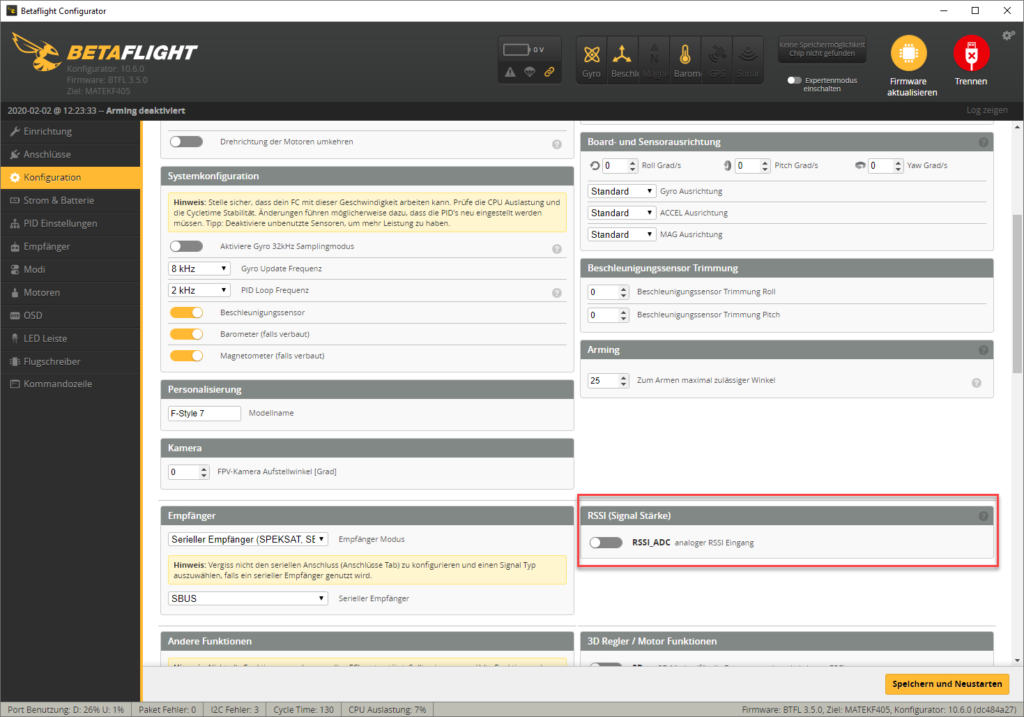
Einstellungen in Betaflight für RSSI
Damit nun das RSSI Signal, welches vom Sender wieder zurückgesendet wird, für den OSD RSSI Wert verwendet werden kann, sind nur wenige Einstellungen erforderlich.
Auf der Seite KONFIGURATION gibt es die Einstellungen RSSI (Signal Stärke). Diese MUSS ausgeschaltet sein:
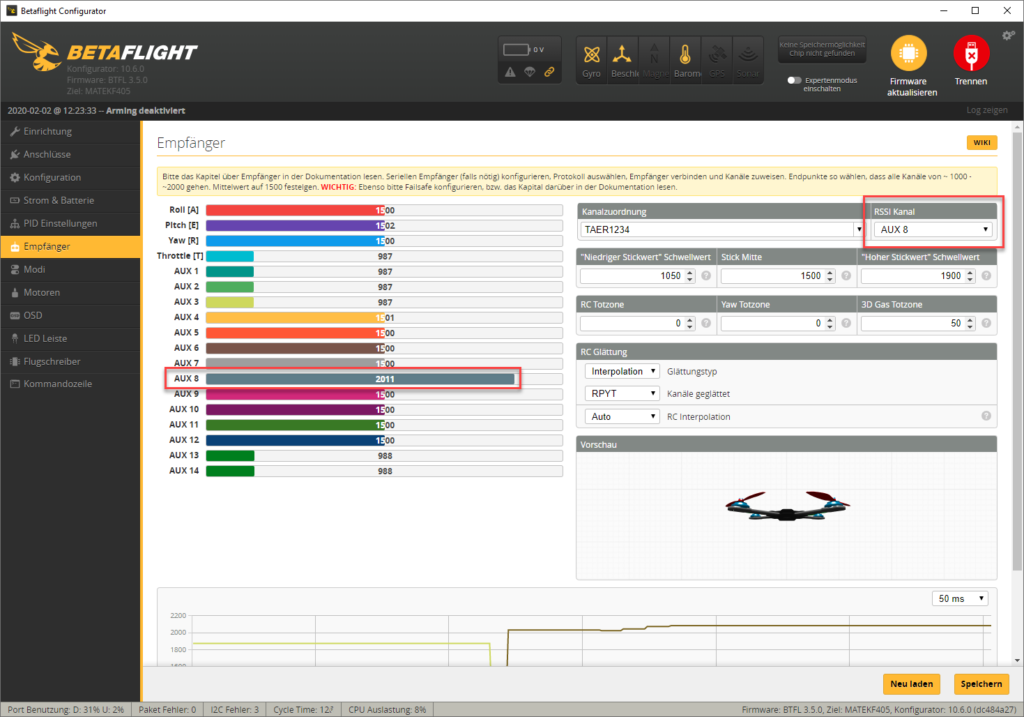
Auf der Seite EMPFÄNGER sollte nun der AUX Kanal 8 (bei eingeschaltetem Sender) „zucken“, also leicht ausschlagen. Bei Betaflight werden die ersten vier übertragenen Kanäle vom Sender für Roll, Pitch, Yaw und Throttle verwendet. Aux beginnt ab Kanal 5. Da wie im unserem Beispiel Kanal 12 im Sender eingestellt haben, bedeutet dies in Betaflight AUX8.
Oben rechts in den Einstellungen kann man den RSSI Kanal einstellen. Dort wählt man dann für unser Beispiel AUX 8. Speichern und das wars.
(* = Affiliate/Werbelink)
Kommentare
Eine Antwort zu „RSSI im OSD (Betaflight) anzeigen mit OpenTX“
Hi, muss ich beim R-XSR auch den S.Port verbinden?- falls ja- wohin?
Habe 2 Wizzard220S mit je einem R-XSR und je eine Taranis QX7.
Bei beiden Sendern(QX7) wird kein RSSI Signal empfangen. Suchlauf nach Sensoren erfolglos .Betaflight zeigt mir 50% an – im OSD sind immer nur 49% zu sehen…. was mache ich falsch? Habe beide R_XSR zusammen mit den Taranis QX7 gekauft (eine für meinen Sohn). Es können nicht beide defekt sein . S-Bus ist verbunden – fliegen ok, Reichweite auch ok, aber KEINEN (brauchbaren) RSSI !!! Habe schon alles versucht, viele YT-Videos geschaut, aber kein Erfolg….Wo ist der Fehler?